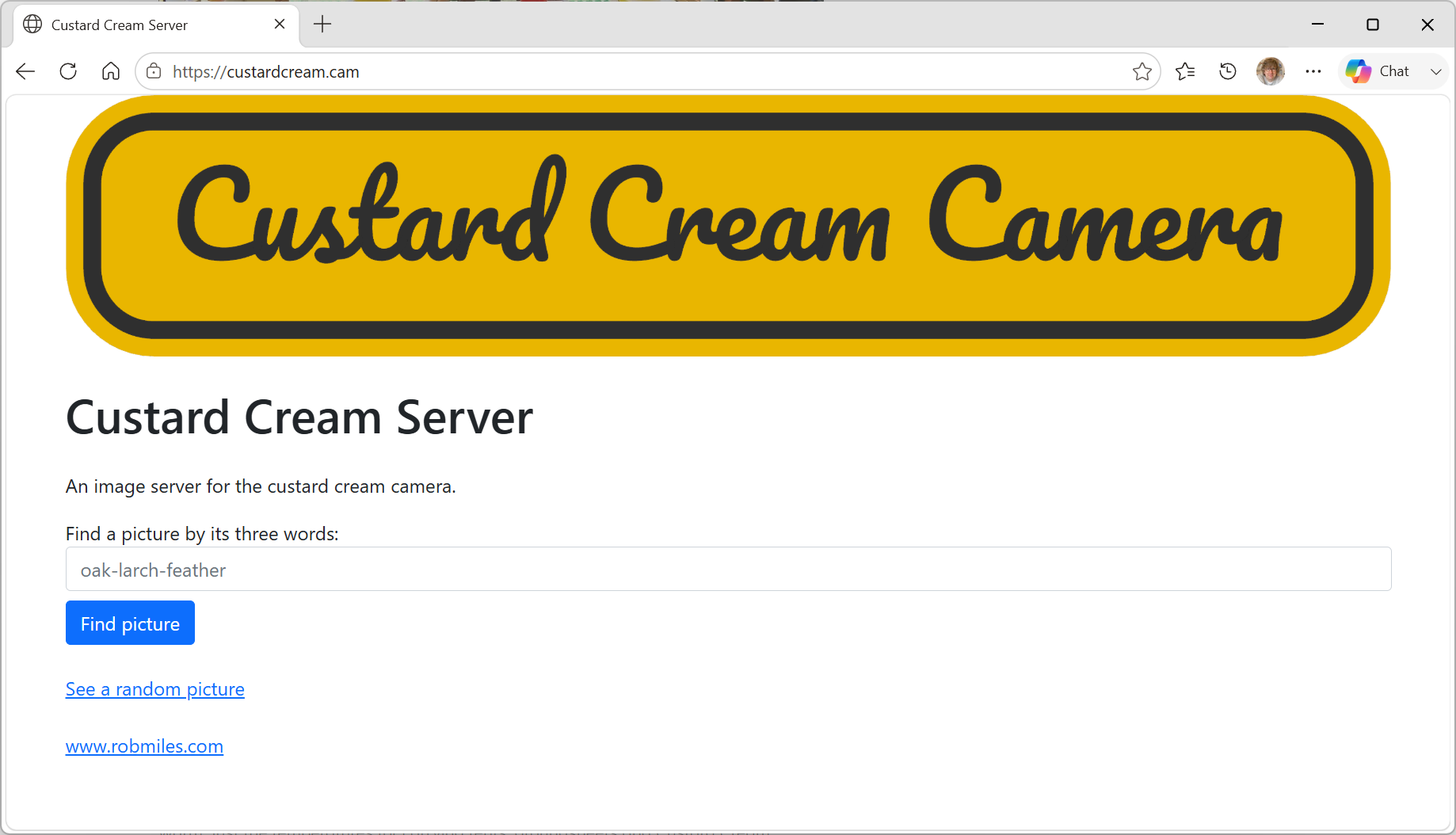
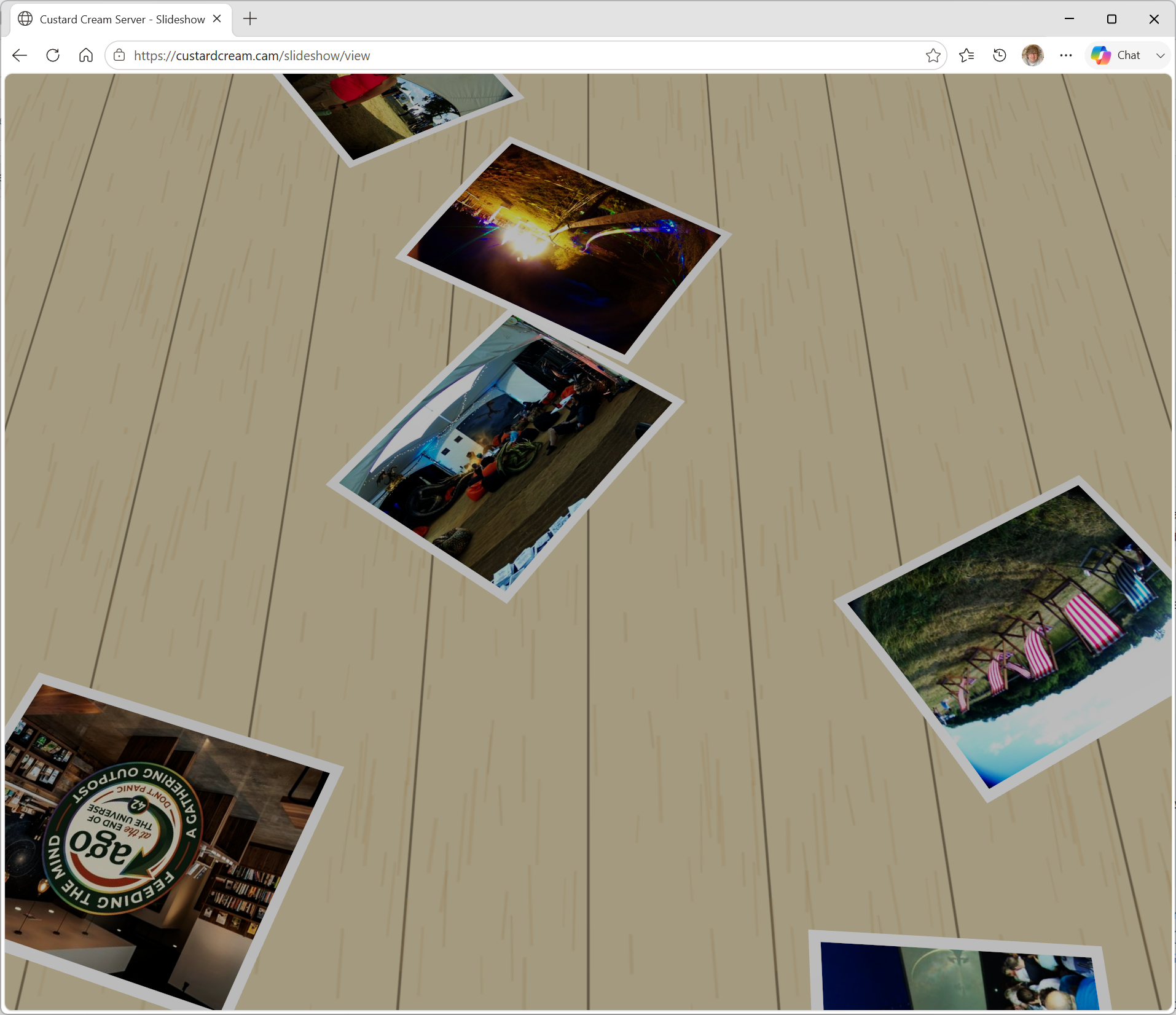
Picture Table View on the Custard Cream Server
/
I should probably make it display the pictures the right way up
One of the things I liked the most about the PlayStation 3 was a photo display mode which showed your pictures being dropped onto a table as if they were physical photographs. Yesterday Claude and I had a go at replicating the experience in the browser. I think we are getting close. There’s a funny sliding movement when the picture hits the table that needs work and I want to add some more lighting effects, but it is quite fun to watch. If you want to see it in action, head to https://custardcream.cam/ and click “Watch the slideshow”.