Hull Pixelbot Scripting Language lives
/
One of "Robert's Rules" of programming is that things that sound simple often aren't. And things that sound complicated often aren't. A while back I had an idea for a simple scripting language that could be used to control Hull Pixelbots (or anything else embedded). It sounded simple. It's not.
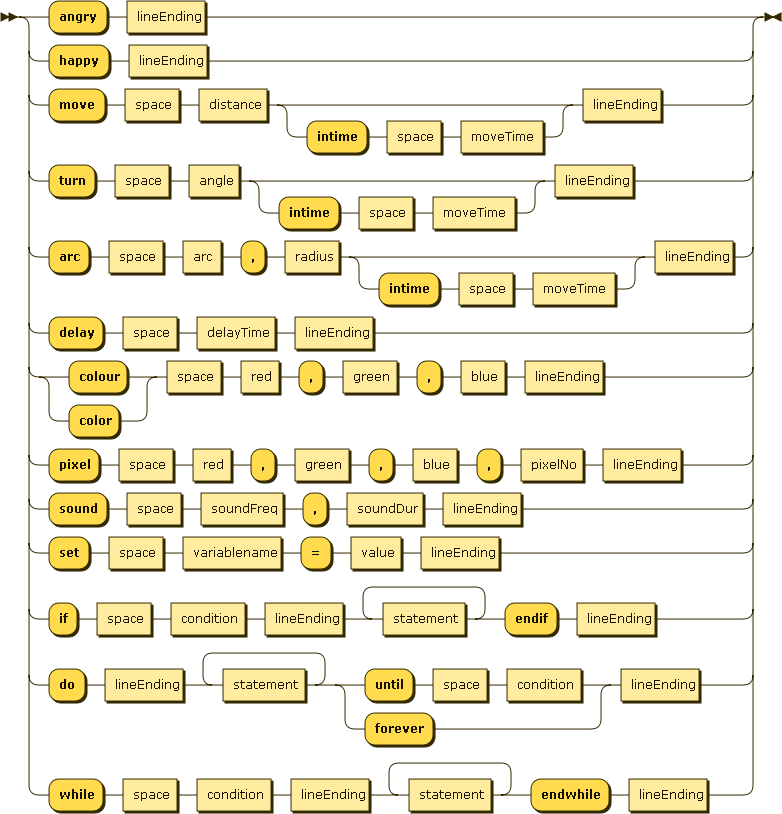
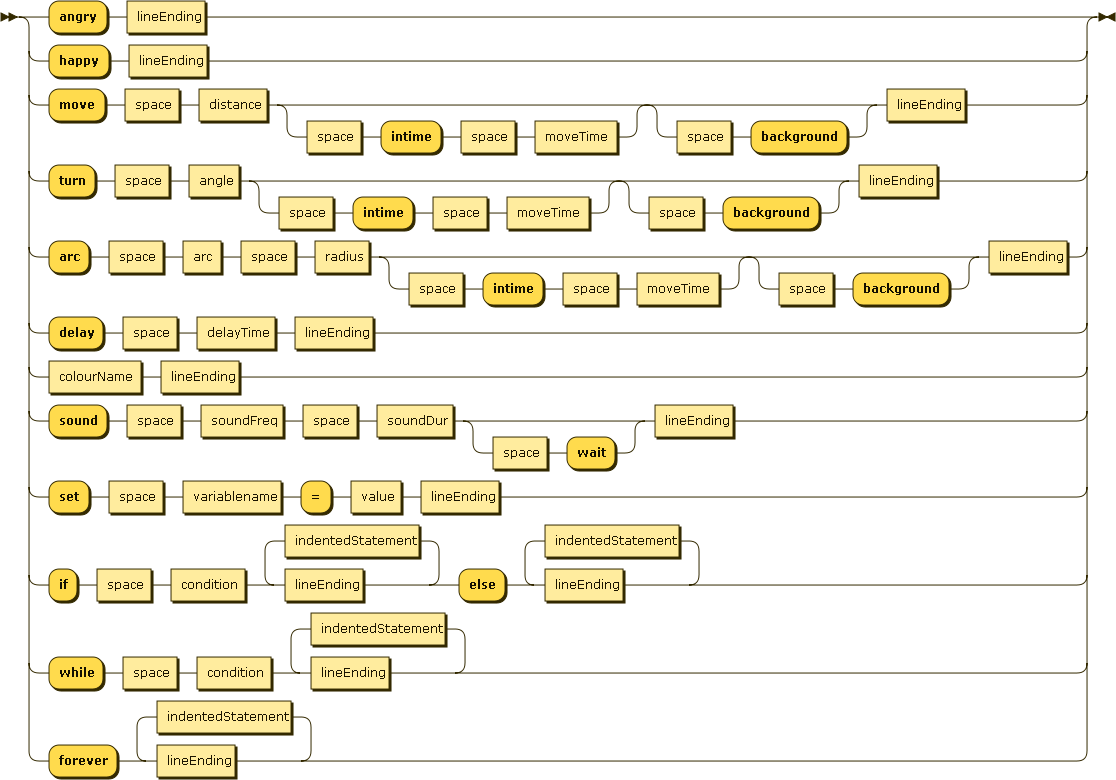
I've been playing around with the language and I've just about got it going. It's not as simple as I might like, but it does work. The biggest change that I've made from previous versions is to use the "Python" style of code blocks. I did have "endif" keywords to mark the end of conditions but I found these really irritating (I kept missing off the endif and then wondering why the program wouldn't compile). So now you indicate which statements are controlled by a condition (or a loop) by just indenting the statement. Want to see some sample code?
begin
move 100 wait
turn 180 wait
move 100 wiat
end
This program would move the robot forward 100, make it turn 180 degrees and then move back. The wait element means "wait for this move to complete before performing the next statement". If the wait element is omitted the program starts the action and then moves onto the next statement immediately. We can make more interesting behaviours:
begin
forever
green
move 100
if @distance < 100
red
turn 90 wait
end
This program makes the robot move forwards. As the robot moves it checks the value returned by the distance sensor . If the program detects an object less than 100 mm away it turns the robot 90 degrees and then continues moving forward. The red and green commands change the colour of the pixel. The indenting above tells you that the red and turn 90 statements are only obeyed if the distance is less than 100.
The programs are compiled and executed inside the robot. I've written a tiny Python program to send them via the USB port.
Update: I've made some tiny changes to the way that the wait behaviour works after showing someone the language and realising that it could be better.