EMF Day 3
/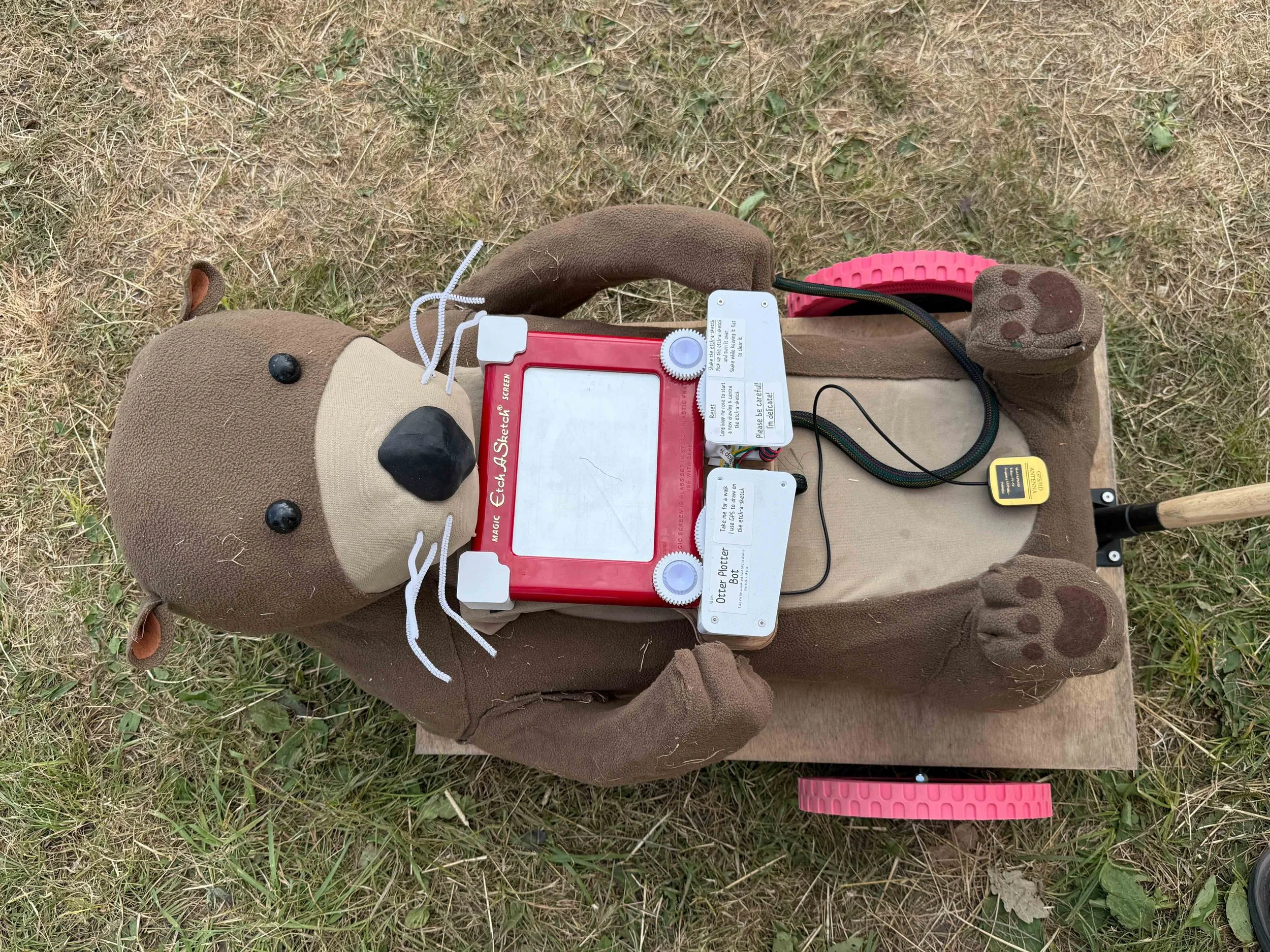
The Otter Plotter
The thing about EMF is that in amongst all the silly things (see above) they also have a whole bunch of serious things (see below).
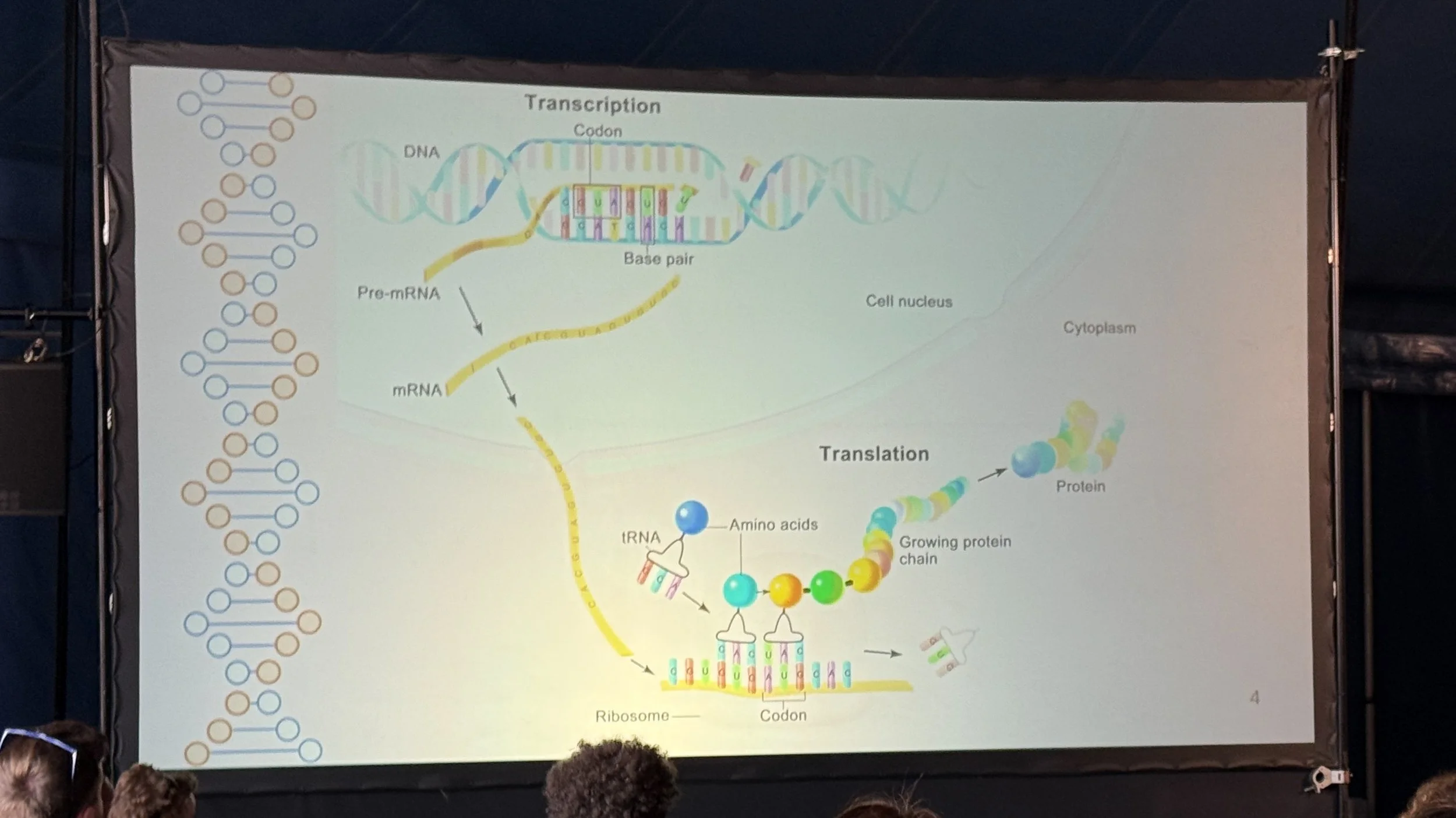
Virus Talk
Alongside daft creations we had proper hard science and some deep discussions. It is also wonderful to see artists and engineers working together to make the most amazing installations. I’ve never seen so many at an emf before.
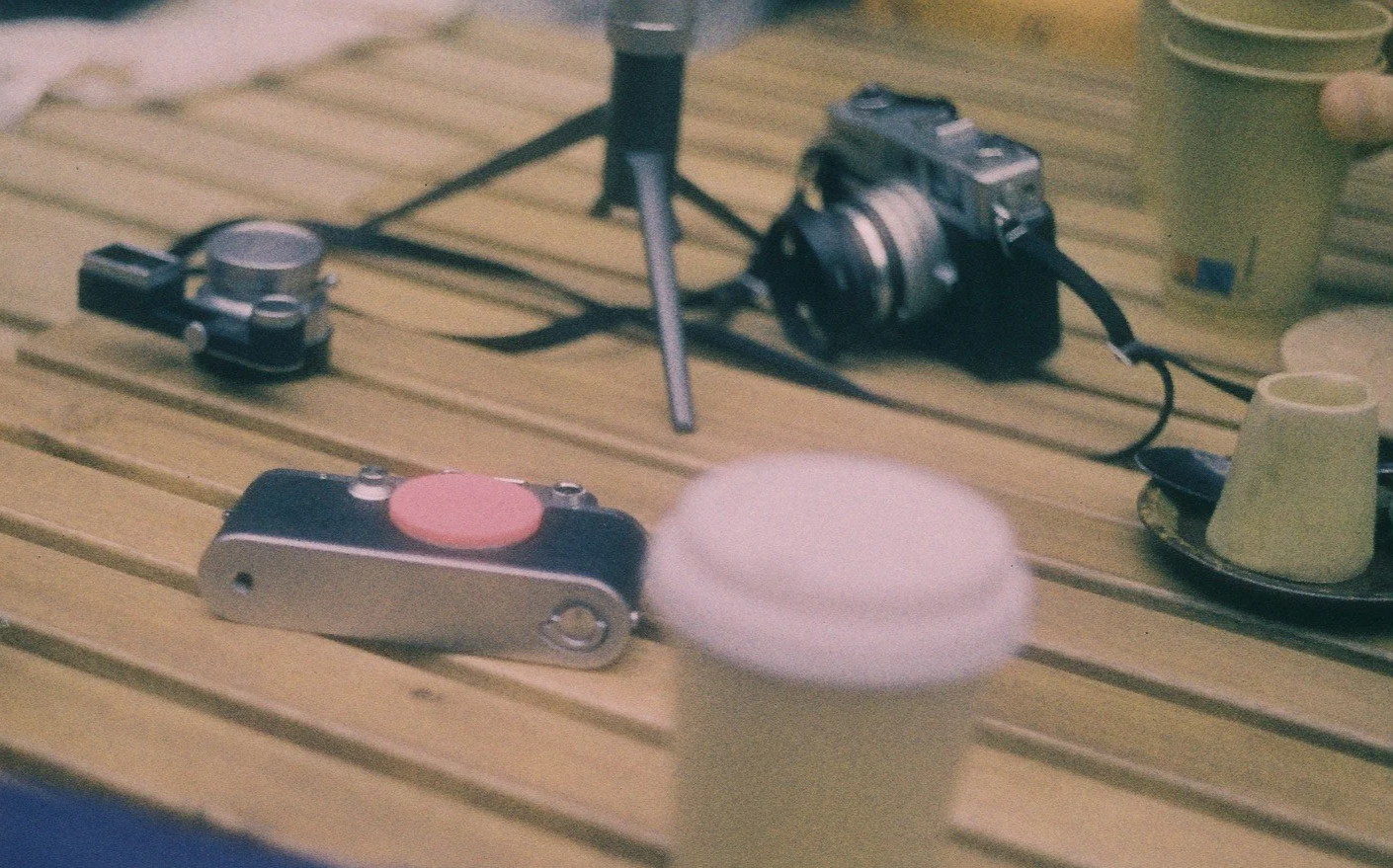
I went to a super session about photography which started from first principles and taught me a few things I’d never thought properly about. I was then lucky enough to have a chat with the presenter, try to take their picture with the Custard Cream Camera and totally fail because the LCD panel was impossible to see. Oh well. This is just a super fun place to be. In the evening they had a showing of the movie Apollo 13 using a proper 35mm projector.
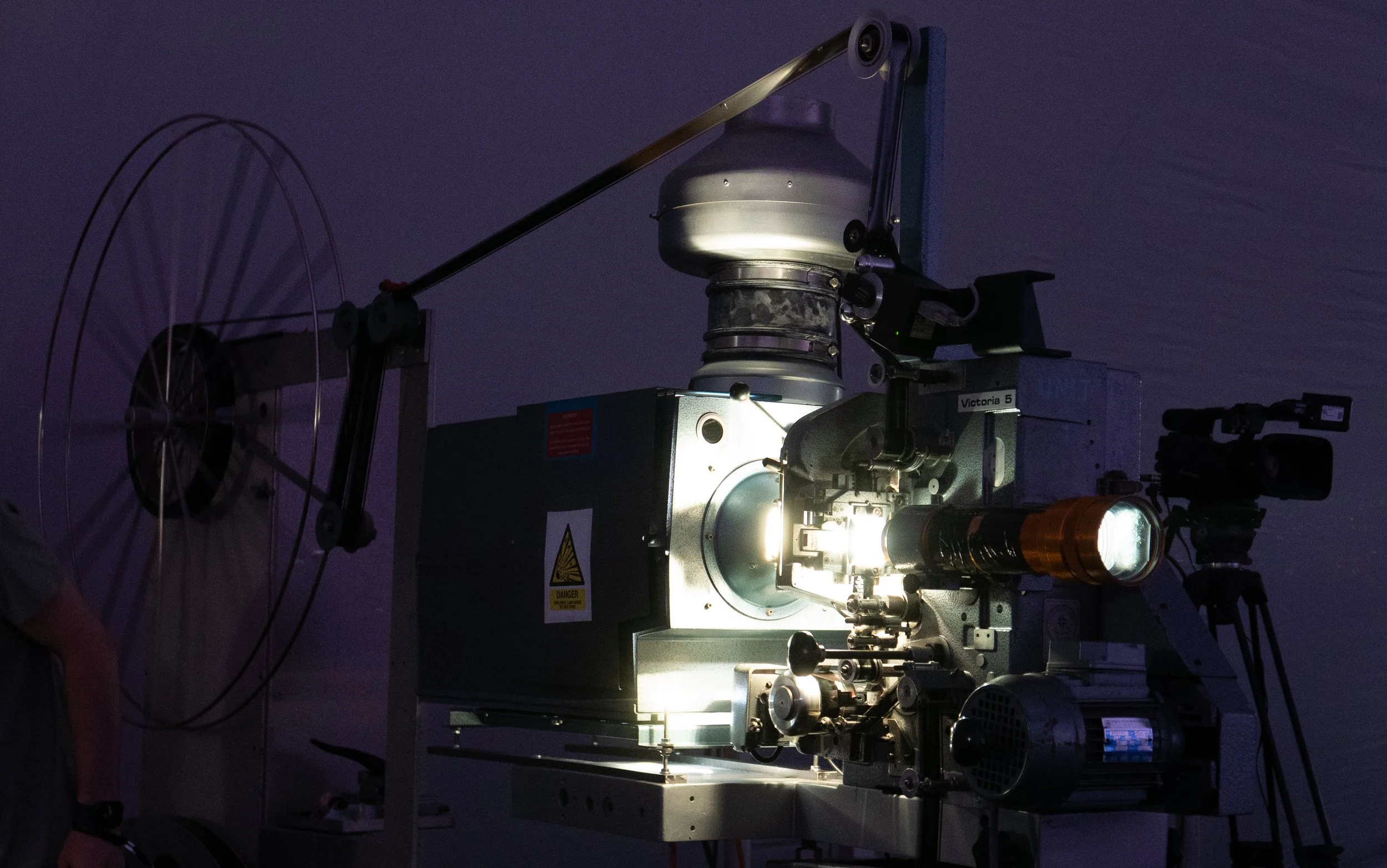
This is the projector at the end of the show. That big reel on the left was full of film at the start. Just the sound of the projector firing up and the look of the film were great. And we got the full sound treatment too as they were using the DTS theatre soundtrack. Awesome.